
2022 年 9 月にルクセンブルクのロッハル コンサート ホールで壁に止まったハエだったら、奇妙な光景が目に飛び込んできたでしょう。バンドも歓声を上げる群衆も見えず、代わりに 220 トンの溶岩で満たされたエリアが広がっていました。ロボットのチームが資源を求めてほこりっぽい床を這いずり回る岩。
これは欧州宇宙機関(ESA)の宇宙資源チャレンジの第2回で最終ラウンドで、研究グループにプロトタイプロボットを持ち込み、模擬的な月環境で資源を探査する能力をテストするよう呼びかけた。その目的は、将来の有人ミッションに不可欠な水などの月資源の位置を特定し地図を作成するのに役立つ、次世代のロボット宇宙探査機のための優れたアイデアを探すことでした。
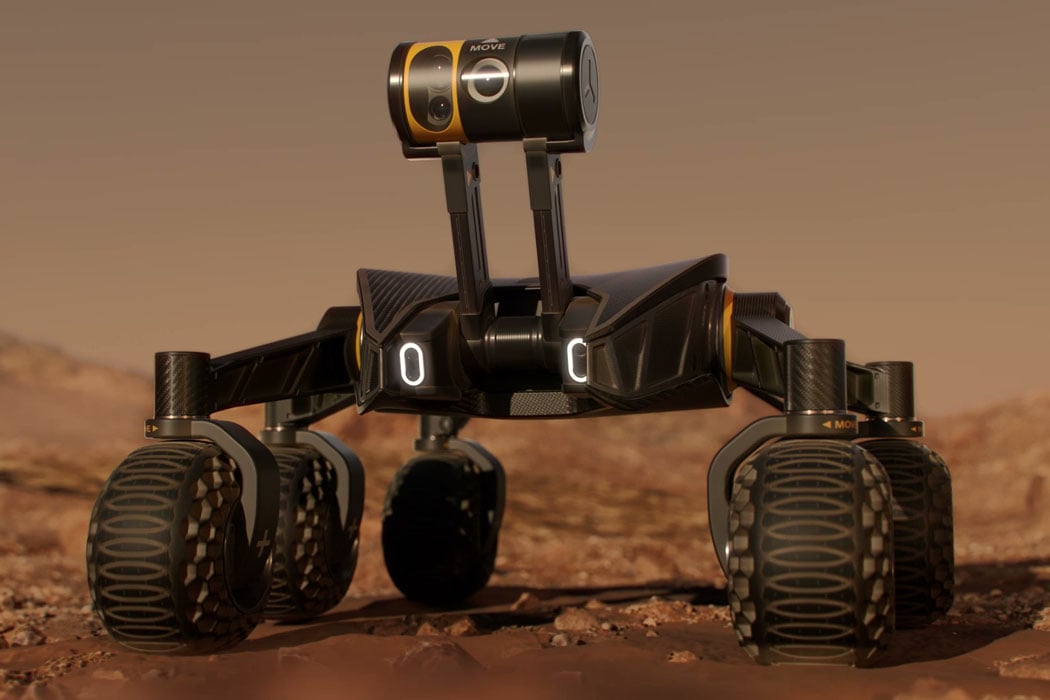
このチャレンジの優勝チームの 1 つが、アリーナ内を小走りしたり、よじ登ったり、つついたりしながら、協力して地図を作成し、特定し、科学サンプルを収集する 3 組の脚付きロボットでした。この課題は月に焦点を当てていましたが、同じ原理が火星や他の惑星に向かうロボットにも適用でき、このアプローチによりロボットがこれまで見たことのない新しい環境を探索できる可能性があります。
私たちは、脚式ロボットを作成したグループであるチューリッヒ工科大学ロボットシステム研究室のヘンドリック・コルベンバッハ氏に詳しく話を聞きました。
脚を使ったアイデア
野心的な月のボットは、ゼロから構築されるわけではありません。これらは、Boston Dynamics のロボットと同様の脚付きロボットを作成する ANYbotics の市販ロボットとして開始されます。これらのモデルは主に産業検査に使用されますが、世界外の探査にも使用できる可能性があります。
ロボット システム ラボは、火星の表面の岩を掴むためのロボット アームを追加したり、地形の変化に対処するためにさまざまな歩行パターンを試したりするなど、これらのロボットのハードウェアとソフトウェアをカスタマイズしました。中型犬ほどの大きさで、ESAの挑戦で使用されたバージョンのロボットは最大33ポンドの小さな積載量を運ぶことができたが、新しいシステムは最大110ポンドまで運ぶことができるとコルベンバック氏は述べた。
脚式ロボットがカメラ、分光器、さらには小さなドリルなどの科学機器を運ぶにはこれで十分です。ロボットは強化学習を使用してトレーニングされるため、シミュレーションを使用して困難な環境を動き回る方法を学習します。彼らは、4 番目の手足で周囲の物体を突いたり操作したりしながら、3 本の脚を使って立ち上がることさえ学ぶことができます。
このような研究の最終的な目標は、モジュール式ハードウェア システムを作成することです。宇宙探査機をミッションごとに一から構築する必要があるのではなく、将来のミッションでは、必要に応じてさまざまな機器やソフトウェアに適応できる基本構成を使用する、地球上で開発されているロボット技術を活用できる可能性があります。
コルベンバック氏は、これを CubeSats のアイデアと比較しました。これは、さまざまなペイロードの組み込みを可能にし、宇宙開発を安価にし、ハードウェアを再利用可能にする標準化されたインターフェイスとフォームファクターです。

未知の世界を探検する
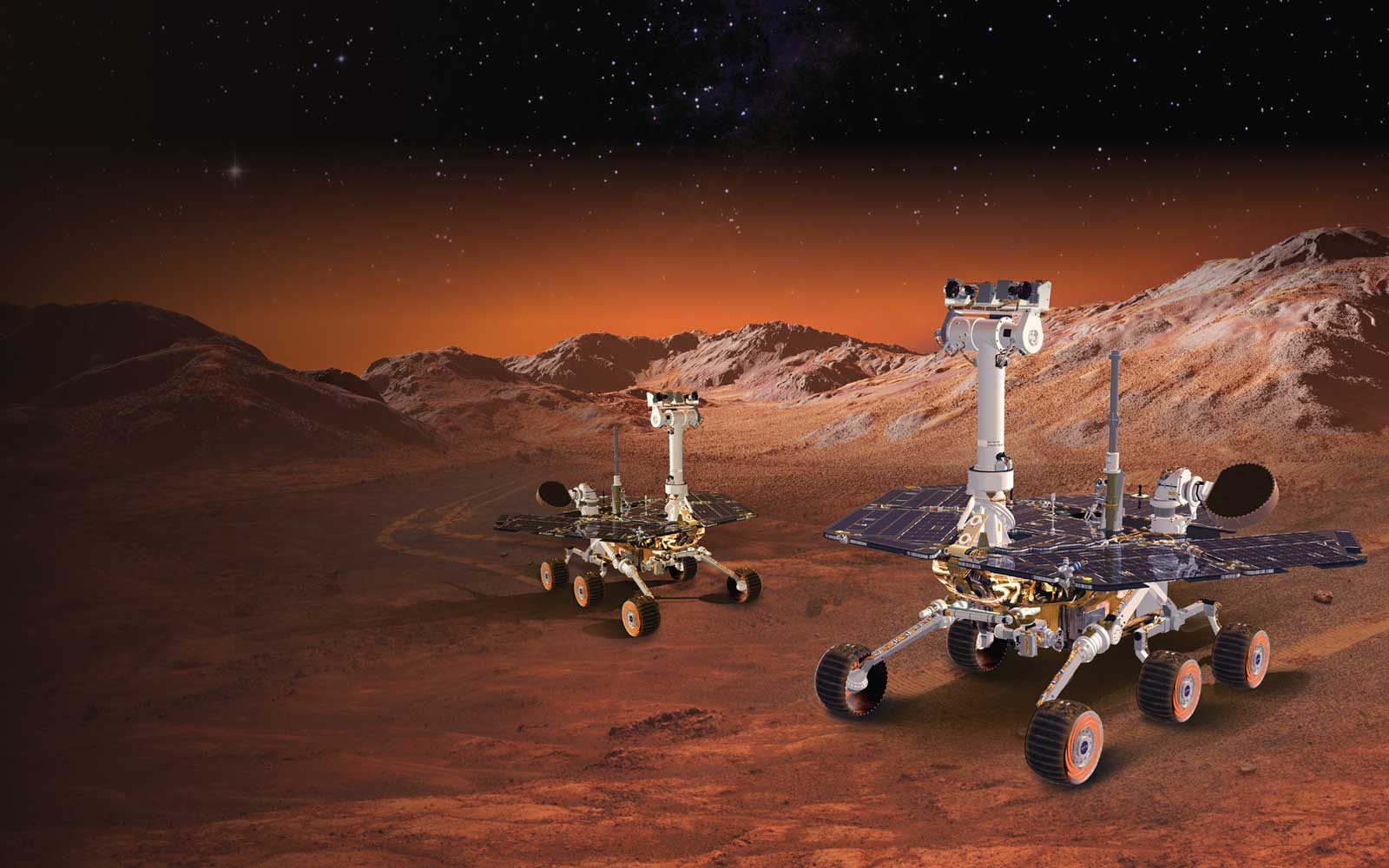
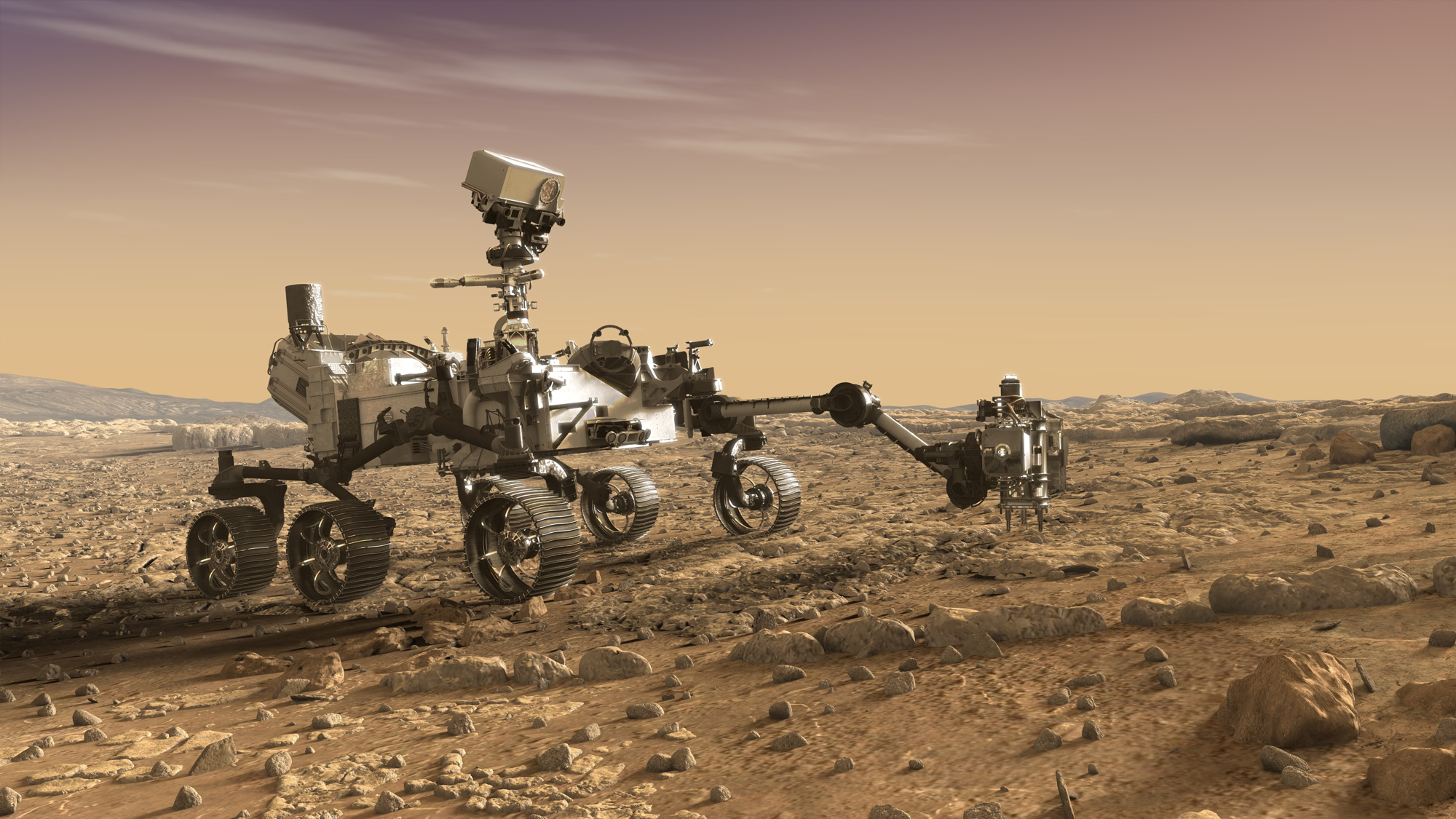
現在火星を探索している探査機「 キュリオシティ 」や 「パーサヴィアランス」 のような車輪付きロボットは、いくつかの用途に最適です。彼らは広く開けた地形を比較的速く移動し、驚くほど大きな岩やその他の障害物を回避したり、乗り越えたりすることができます。 キュリオシティに起こったように、火星の地表を何年にもわたって走り回ったため に必然的に車輪が損傷したとしても、ドライバーが注意している限り、車輪はまだ走り続けることができます。
では、なぜ脚式ロボットが必要なのでしょうか?それはすべて、ミッションが探索したい環境によって異なります。たとえば、火星と月の表面はレゴリスと呼ばれる塵っぽい物質で覆われており、探査車はレゴリスを通過するように設計されています。
しかし、どちらの場所にも、溶岩洞などの興味深い地下領域もあります。溶岩洞とは、大昔に熱い溶岩が通過することによって地表の下にできた洞窟のような構造物です。
これらの溶岩洞は であり、宇宙飛行士がその中に地下基地を設置し、地表の危険な放射線から保護できるため、将来の有人ミッションのため のシェルターとして使用するという実用的な関心もある 。しかし、これらの環境がどのようなものであるかを正確に知る人は誰もいないため、それらの環境を探索したいロボットは多用途で、予期せぬ課題に対処できる必要があります。
脚式ロボットはこのような環境に最適です。クレーターにあるような急な斜面に対処するのにも適しています。これは、永久に影に覆われ、重要な水氷資源が存在する可能性のあるクレーターが存在する現在の探査活動のホットスポットである月の南極のような地域にとっては便利だ。
坂道は難しいかもしれません。 「車輪付きロボットでは、常にトラクションの問題が発生します」とコルベンバック氏は説明しました。 「レゴリスは乾燥した粒状の物質なので、探査機が立ち往生するケースがよくあります。」
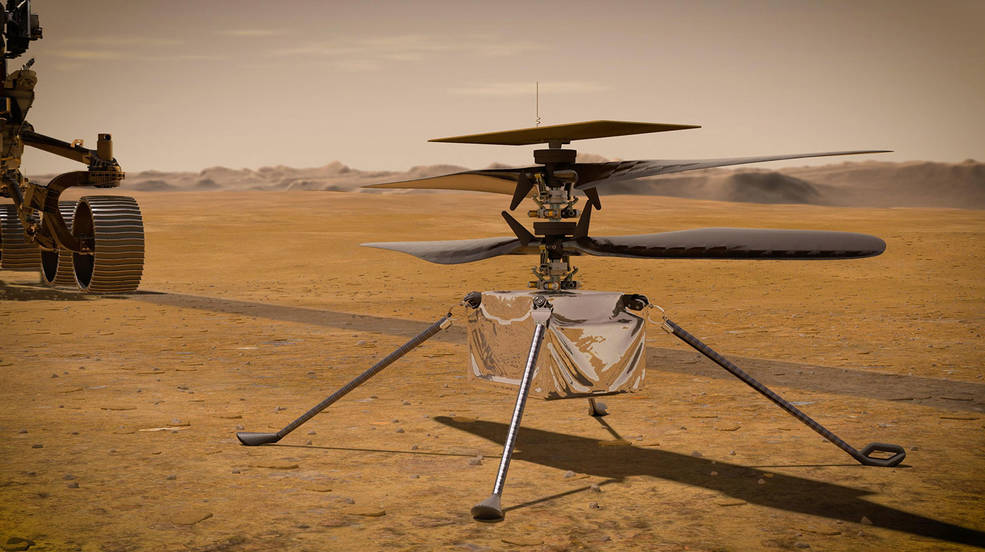
脚式ロボットは「一般に機動性が高いが、それには代償が伴う」。大きな問題のない平坦なエリアでは、車輪付きロボットの方が効率的であり、より複雑な脚付きロボットは必要ありません。広い地域の概要を把握するには、Mars Ingenuity ヘリコプターが実証しているように、上空から測量するオプションがあります。しかし、予測不可能で構造化されていない地形に関しては、脚式ロボットは「非常に機敏で堅牢です」とコルベンバック氏は言う。 「ここにこのロボットのユニークな価値があります。」
チームとして働く
ロボット探査の課題に取り組むもう 1 つの方法は、チームワークの可能性を考慮することです。各脚ロボットは現在の火星探査車よりもはるかに小さいため、単輪ロボットと同じ積載量を運ぶには複数のロボットが必要になります。しかし、ロボットは個別にもチームとしても作業できるため、それが利点になる可能性があります。
ESA の挑戦では、研究室は 3 足ロボットのチームを使用しましたが、理論的にはミッションの必要に応じてチームを大きくしたり小さくしたりすることができます。さまざまなペイロードをチームメンバー間で分散する方法を変更することで、ロボットのスペシャリストを作成できます。たとえば、あるロボットは広いエリアを素早くマッピングするためのツールを搭載し、別のロボットは特定の関心のある地点を詳細に調査するための科学機器を搭載することができます。
現在、このようなより挑戦的な環境にトレンドが移っています。なぜなら、そこでは非常に興味深い科学を行うことができるからです。
これにより、最も重要な機能をチームメンバー間で共有できるため、冗長性の利点も得られます。そのため、1 台のロボットが何らかの理由で故障した場合でも、他のロボットは動作を継続し、故障したロボットのタスクの大部分を引き継ぐことができます。
ロボットのチームが相互に通信する方法については、ロボット工学コミュニティでいくつかのアプローチが検討されています。 1 つは、各ロボットの動作を調整する中央基地を設けることです。これは、サンプル収集などのタスクを実行するためにロボットをさまざまな方向に送り出し、分析のために基地に戻すことができるため、広くて開けたエリアを探索するのに理想的です。より大きくて重い器具は中央のベースユニットに残され、ロボットが配達員として機能する可能性があります。
もう 1 つのアプローチは、ロボットがコマンドを送信する中継器として機能する通信ノードを使用することです。これは、通信が制限される可能性がある地下領域を探索するのに理想的です。ロボットは、 パンくずリストのようなセンサーの軌跡を ドロップしてコマンドを中継し、未知の環境でも通信できるようにすることができます。
このアプローチの本当の利点は柔軟性です。各ロボットが運ぶペイロード、チームに含まれるロボットの数、チームの構成はすべて、特定のミッションや環境のニーズに基づいて調整できます。
宇宙へ行く
研究者らが取り組んできた脚式ロボットは市販のハードウェアであるため、宇宙探査技術としての可能性は示されているものの、宇宙にふさわしいものになるには程遠い。ハードウェアを宇宙ミッションに投入するには、幅広い温度に耐える能力から、打ち上げ時の振動や衝撃への対処、地球外には修理工場がないため非常に高い信頼性の必要性まで、厳しい要件が求められます。
そのため、準備として、チームは スペースホッパー と呼ばれる宇宙飛行に対応した脚付きロボットの開発に取り組んでいます。 「これは比較的小規模なロボットです」とコルベンバック氏は言う。重量は 22 ポンド未満で、既製の宇宙飛行用ハードウェアが使用されています。 「研究プロトタイプから実際の宇宙探査機への移行は多大なエンジニアリング作業であるため、これは実用的な第一歩でした。そこで私たちは小規模なものを作ることにしました。」
彼らは、宇宙機関と月への商業ミッションの強化にちょうど間に合うように、ホッパーが今後数年以内に技術デモンストレーションとして飛行する準備が整うことを期待している。うまくいけば、新しい環境を探索するための、より大型でより複雑な脚ロボットのさらなる開発への扉が開かれるでしょう。
コルベンバック氏は、将来の脚式ロボットの使用について「簡単なことだ」と述べています。惑星探査には車輪付きロボットが依然として意味をなすケースが多くありますが、より挑戦的で科学的に興味深い環境を探査する場合、彼は脚式ロボットが未来であると考えています。
「これには明らかにニーズがあります」と彼は言いました。 「私たちはこれまで、他の天体の比較的平坦で過ごしやすい環境で多くのミッションを行ってきました。しかし、現在では、非常に興味深い科学を行うことができるため、このようなより困難な環境にトレンドが移っています。科学界からは、そこに行くことが明らかに要求されています。そして、脚式ロボットは、私たちをその科学に導くことができる新興テクノロジーの 1 つです。」